Gem Island
Are you fresh off the back of the long weekend and looking to sink your teeth into some combinatorics and induction? Great then you’ve come to the right place so pull your discrete mathematician stocking over your head and let’s get started.
Welcome to Gem Island! Home to N happy islanders. Each of which has exactly one gem. Each night something peculiar happens. One of the gems on the island is chosen uniformly at random and it splits creating a new gem for the owner. This process repeats each night for D nights. Here is an example of all 6 situations that could arise if there were (N=2) islanders after (D=2) nights. Here we’ve coloured the first islander’s gems red, the second green and the vertical bar separates the islanders to make things easier to read.
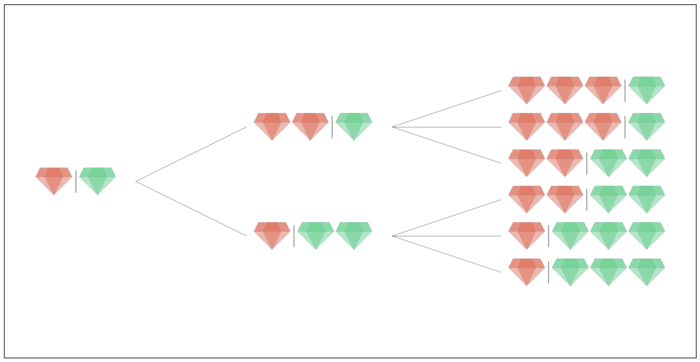
We are interested in the expected value, of the number of gems, the R richest islanders have. In the case above the R=1...